Rosa Media Player
В составе ROSA Desktop Fresh 2012 GNOME находится ROSA Media Player (далее, ROMP). Для запуска приложения используйте меню «Обзор».
Внешний вид ROSA Media Player
ROMP поддерживает все популярные видеоформаты. В верхней части окна находится меню, через которое осуществляется все управление программой. В нижней части имеется панель воспроизведения. Она выполнена в «классическом стиле» и запутаться в ней трудно.
Для того, чтобы открыть видеоролик нажмите на пункт «Открыть», а затем щелкните по пункту «Файл». Для того, чтобы выбрать звуковую дорожку перейдите во вкладку «Звук», а затем в пункт «Дорожка». Там отображаются все доступные звуковые дорожки для этого видеофайла.
Также к фильму можно подключить субтитры. Для этого в главном меню откройте вкладку «Субтитры», а затем нажмите на пункт «Выбрать». Появится список доступных субтитров. Если вы не нашли в списке нужные, то не беда: в той же вкладке имеется пункт «Поиск субтитров на Opensubtitles.org». Это большая база данных субтитров и вы наверняка найдете там подходящие.
Помимо воспроизведения видеофайлов ROMP обладает парой функций, которые отсутствуют у других видеопроигрывателей: извлечение аудиодорожки из видео и его резка. Для доступа к ним нажмите на зеленую стрелку в правом нижнем углу. Появится окно списка воспроизведения, в верхнем выпадающем списке которого вы легко найдете требуемую функцию.
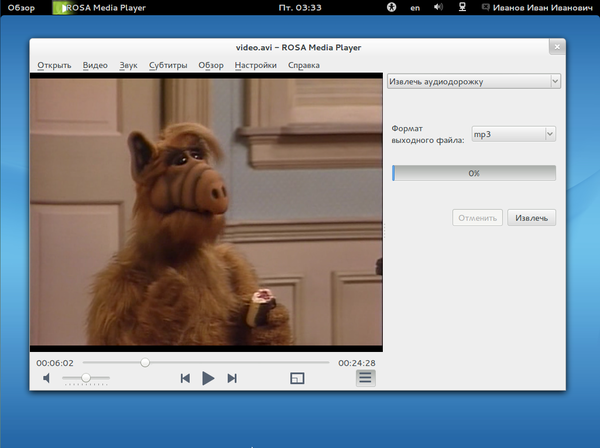
Функция сохранения аудиодорожки
Аудиодорожка может быть сохранена в форматах mp3 и ogg. Выбрать несложно, поскольку это единственная доступная настройка. После извлечения аудиофайл появится в одной папке с видео.
Инструмент для резки видео также достаточно прост, а его интерфейс отличается лаконичностью.
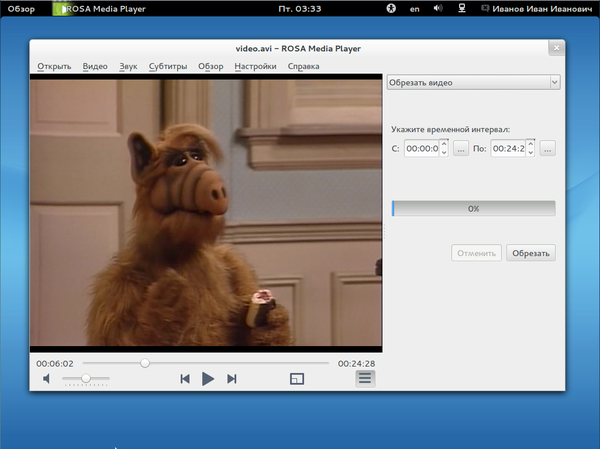
Функция резки видеофайлов
Прочие косяки
В настройках не обнаружил KDE-Connect (привык, что она там есть по умолчанию). Пришлось устанавливать вручную. Зато после установки она появилась не только в интерфейсе настроек, но и отдельным приложением в разделе меню Интернет (хотя зачем оно там нужно — непонятно).
Те, кто привык к браузеру Chromium, сначала обрадуются — он установлен здесь вместе с firefox. Но запустив его, они сразу же обломаются, когда захотят войти в свой профиль. Вместо входа и синхронизации всего-всего будет сообщения об ошибке:
Повтор попытки дает такой же результат.
Проблема решается скачиванием и установкой Chrome с официального сайта. Скачивать надо rpm-пакет для Fedora/Opensuse.
Кстати, если решите пользоваться Росой, возьмите на заметку:
Но это всё мелочи, на которые можно не обращать внимание (более того, с ними можно даже не столкнуться). Но есть и более глобальные проблемы, которые добавляют нетривиальности при работе с этим дистрибутивом
Одним словом их можно охарактеризовать как
Обзор дистрибутива Linux ROSA FRESH R10 KDE

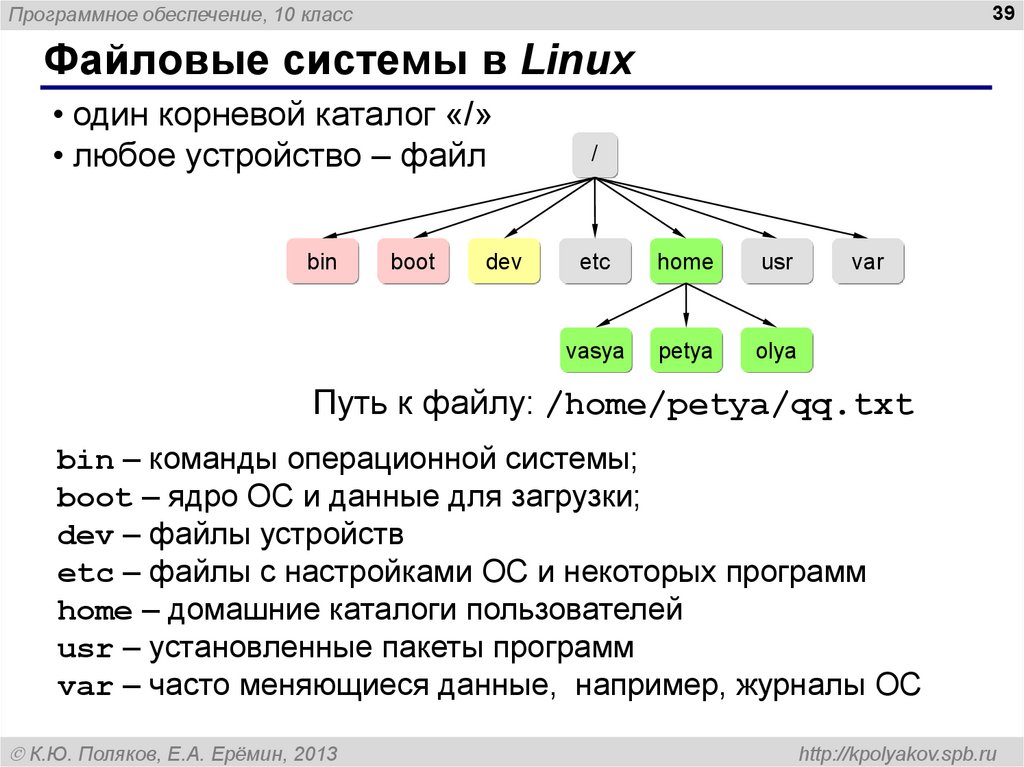
ROSA FRESH – это дистрибутив операционной системы Linux, он бесплатный и предназначен для домашнего использования. Разработкой и поддержкой дистрибутива занимается Российская компания «РОСА» (ООО «НТЦ ИТ РОСА»).
ROSA FRESH выпускается для архитектур процессора i586 (32 битная версия) и x86_64 (64 битная версия). Дистрибутив многоязычный с поддержкой Русского языка.
На текущий момент Linux ROSA FRESH R10 доступен с графическими оболочками KDE и KDE Plasma.
Как я уже сказал, дистрибутив ориентирован на домашнее использование, поэтому «из коробки» доступно все необходимое программное обеспечение для работы за компьютером, по умолчанию здесь есть: офисный пакет, браузер, торрент клиент и другие приложения, а также есть возможность легко установить и такие популярные приложения как Viber и Skype.
К особенностям дистрибутива Linux ROSA можно отнести набор уникальных, функциональных и главное удобных компонентов, например:
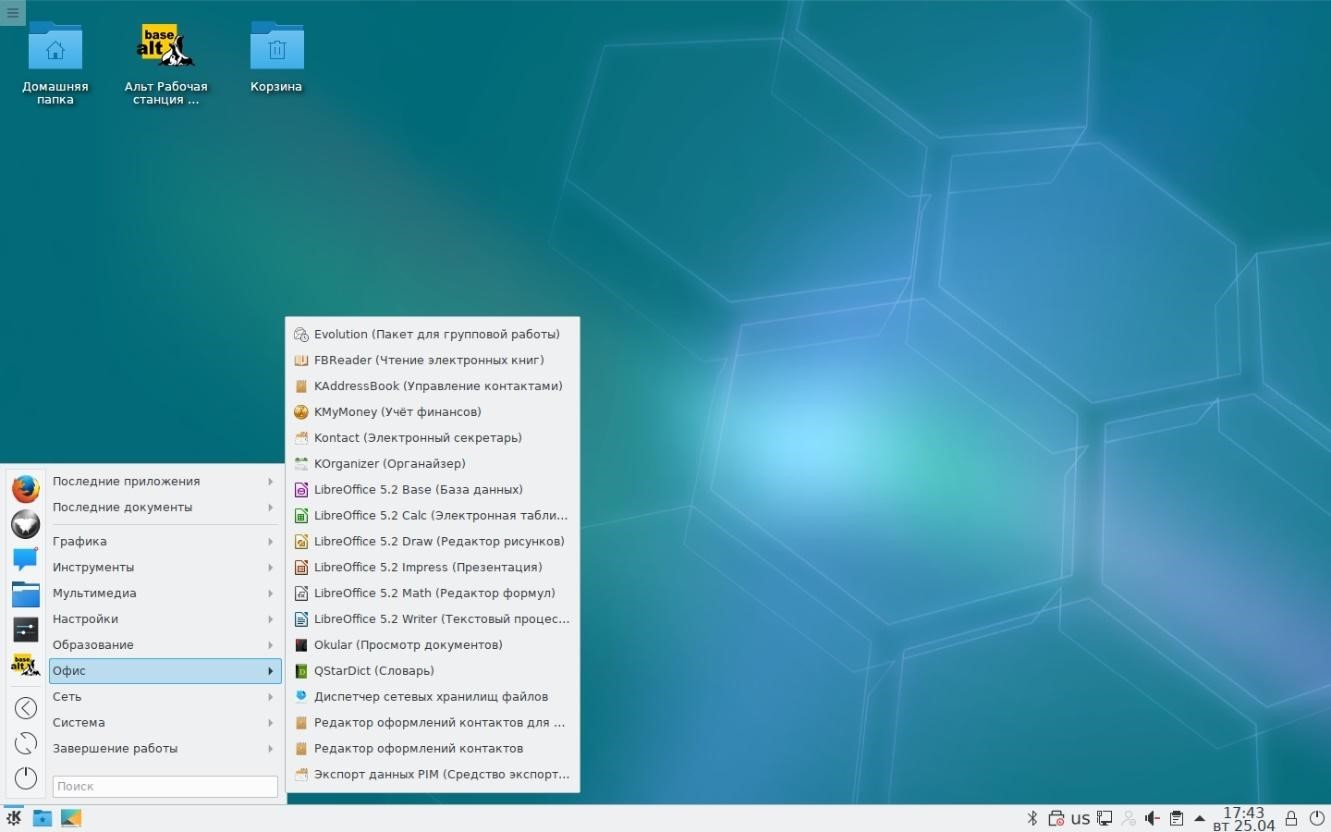
Меню SimpleWelcome – это единая точка запуска приложений и компонентов системы. Меню содержит три вкладки:
- Приветствие — вкладка отображает самые часто используемые элементы, например приложения, которые недавно запускались;
- Приложения – вкладка предназначена для запуска приложений, которые установлены в системе. Некоторые приложения сгруппированы по своему функциональному назначению, например, все офисные приложения сгруппированы в группу Офис;
- TimeFrame — это компонент, который позволяет отслеживать работу пользователя на ленте времени, например, находить файлы, которые редактировались в тот или иной момент времени.

Панель RocketBar – это панель для быстрого доступа и запуска приложений и компонентов. Особенностью панели является возможность использования иконок размером чуть больше самой панели, что добавляет некую оригинальность интерфейсу. RocketBar логически делится на три зоны: Левая – для меню SimpleWelcome, а также для быстрого запуска приложений, Центральная – для отображения текущих задач, Правая – для отображения дополнительных виджетов (часы, корзина и т.д.).
![]()
Общие сведения о работе в системе
Работа с системой большую часть времени происходит через главное меню. Чтобы получить доступ к нему достаточно нажать на кнопку «Обзор» в левом верхнем углу. Также, вызвать главное меню можно с помощью кнопки «Win».
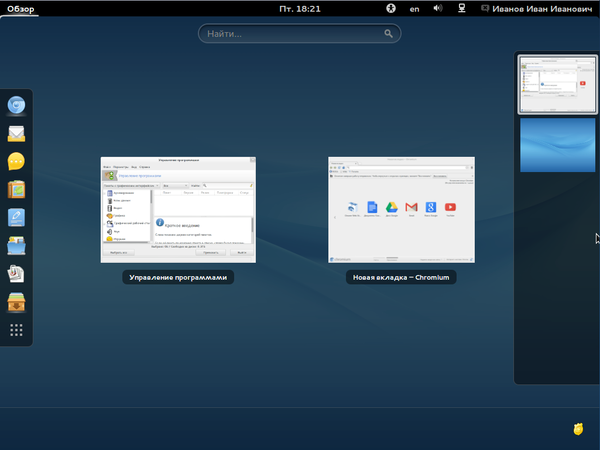
Главное меню ROSA Desktop Fresh 2012 GNOME
Меню разбито на несколько зон. Рассмотрим их по порядку. В центре находятся уже запущенные приложения, в нашем случае это Chomium и Управление программами. Вы можете перейти к любому из них по щелчку, либо используя комбинацию Win+Up, чтобы свернуть главное меню. Комбинация Win+Left/Right позволяет «перебрасывать» окошко с одной стороны экрана на другую.
Справа находится меню рабочих столов. Они удобны, если вы работаете сразу с большим количеством окон. Можно сгруппировать открытые приложения на разных рабочих столах и оперативно переключаться между ними, как с помощью мыши, так и используя комбинацию клавиш Ctrl+Shift+Up/Down.
В нижней части окна находятся иконки приложений, которые работают в фоновом режиме. Здесь же появляются значки оповещений (к примеру, сейчас иконка щита сообщает нам, что мы находимся в режиме администратора).
Слева находится панель избранных иконок. По умолчанию мы уже добавили в него наиболее часто используемые программы, но вы можете сформировать свой. Чтобы удалить приложения из этого поля, нажмите правой клавишей на иконку, а затем выберите пункт «Удалить из избранного». Добавить иконки можно из полного списка приложений, который доступен по щелчку на последнюю иконку в панели. Она выглядит как 9 квадратиков.
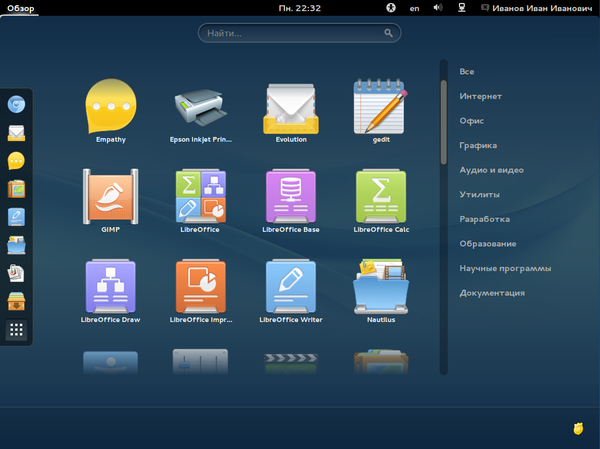
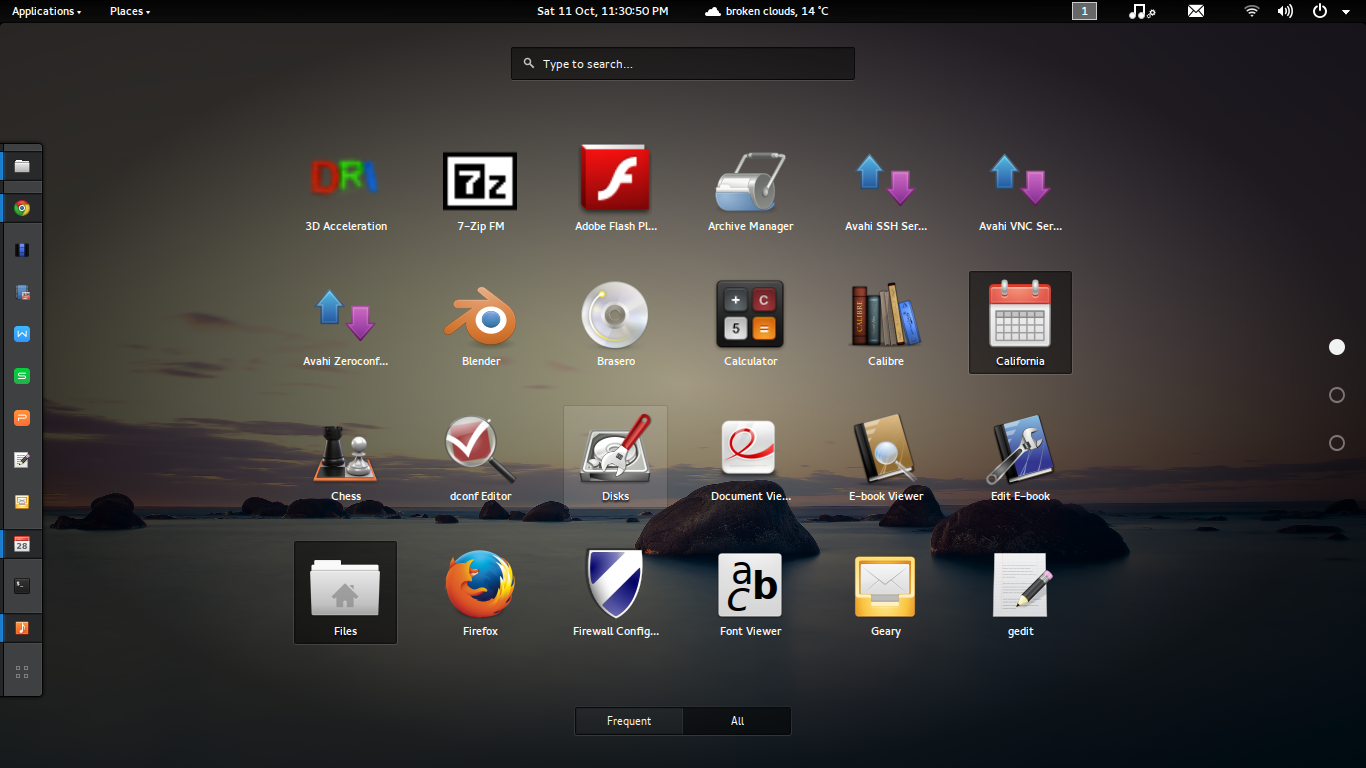
Полный список приложений ROSA Desktop Fresh 2012 GNOME
Нажмите на нее и появится полный список всех приложений в системе. Справа можно заметить группы, в которые они собраны. Чтобы добавить приложение в избранное следует щелкнуть по нему правой клавишей мыши и выбрать «Добавить в избранное». Иконка приложения появится на панели.
Вопросы переключения раскладки клавиатуры
Для того, чтобы установить нужные раскладки нужно их добавить через GNOME Control Center. Заходим в Параметры системы и выбираем пункт Язык и регион.
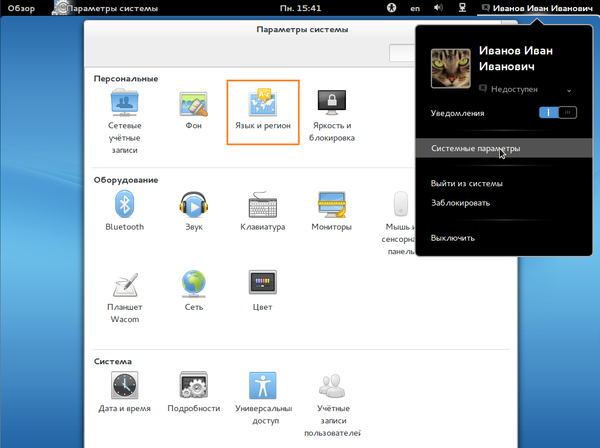
Иконка «Язык и регион»
Подготовка к установке Rosa
1. Загрузка образа
Далее нажмите кнопку Скачать Rosa Fresh, а в следующем окне выберите нужную версию:
Как я уже писал, доступны версии с KDE 4, Plasma 5, XFCE, LXQT. Кроме того, поддерживаются как 32-, так и 64-битные версии.


2. Запись образа на флешку
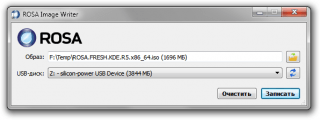
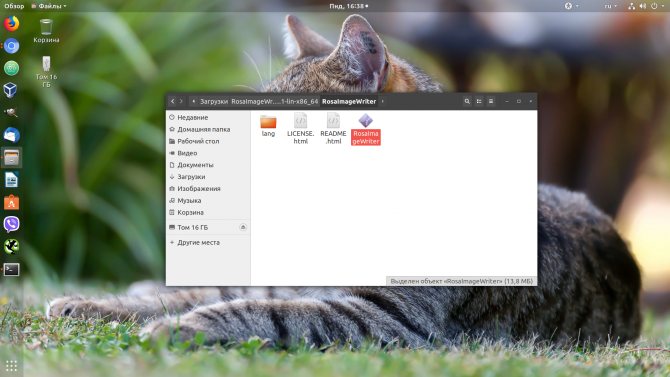
Для записи Rosa на флешку разработчики рекомендуют использовать утилиту RosaImageWriter. Скачать её можно на странице выбора редакции дистрибутива.
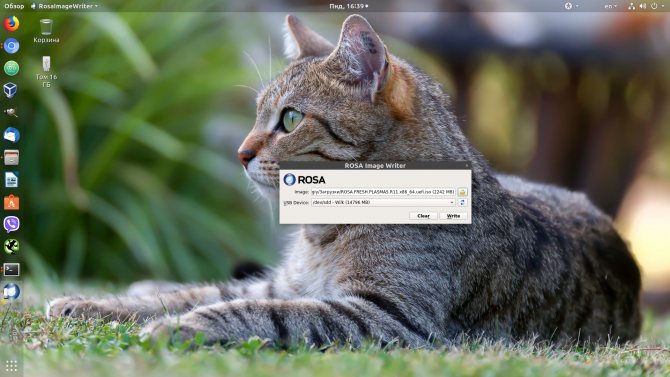
Здесь есть версия для Windows, Linux и MacOS. После завершения загрузки нужно распаковать полученный архив и запустить программу RosaImageWriter:
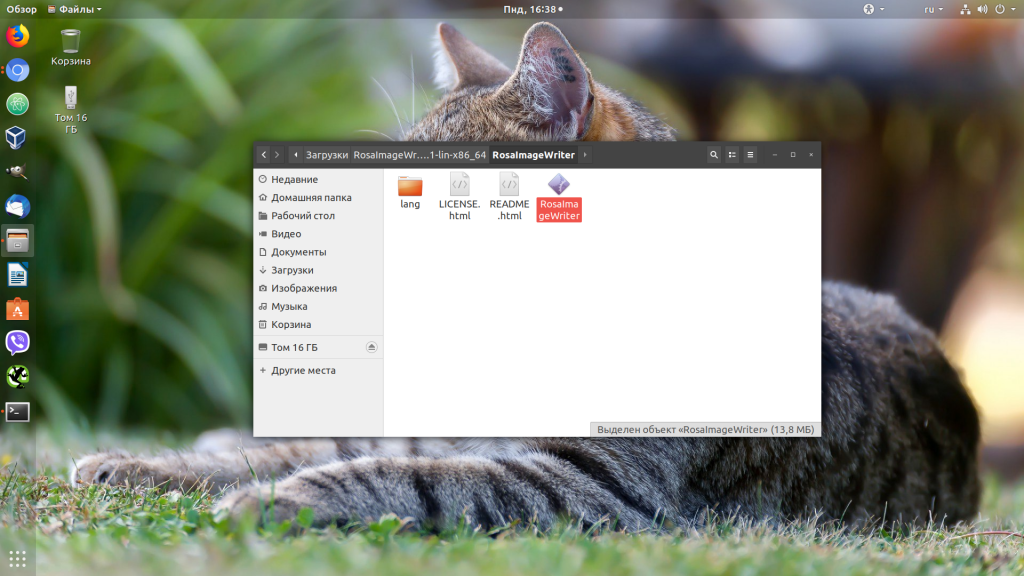
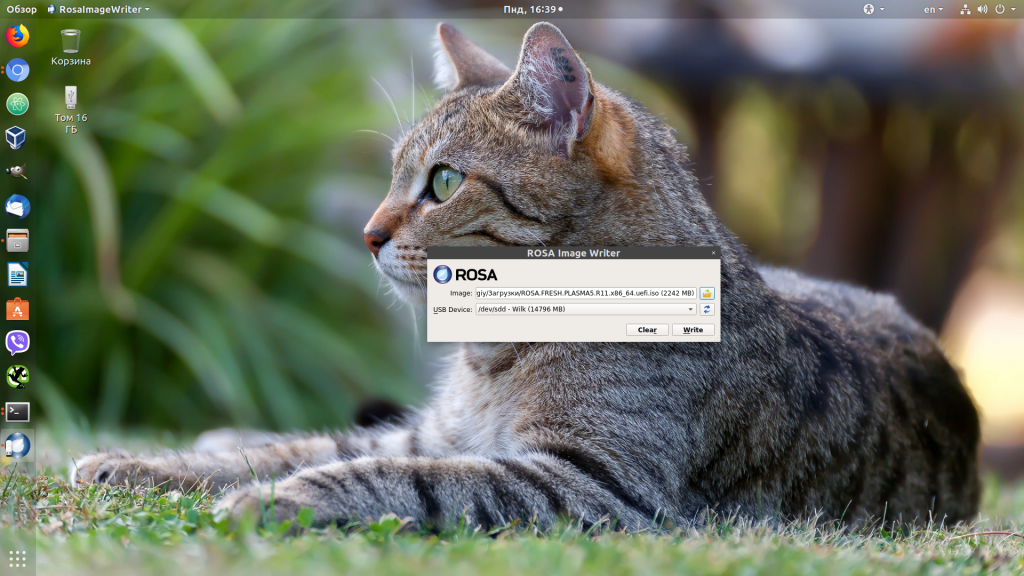
В Linux программу надо запускать от имени суперпользователя. Затем в разделе Image выберите образ Rosa, а в разделе USB Device выберите нужное устройство. Далее нажмите кнопку Write и дождитесь завершения записи:
3. Настройка BIOS
Когда запись образа на флешку будет завершена, можно переходить к установке. В BIOS вашего компьютера нужно установить вашу флешку в качестве первого устройства для загрузки. Чтобы войти в меню BIOS, во время заставки BIOS несколько раз нажмите кнопку Del, F2, Shift+F2 или F8.
Независимо от того, старый у вас BIOS или новый, нужно найти меню Boot и в разделе Boot Device Priority установить на первое место вашу флешку, а затем сохранить настройки и выйти. Флешка должна быть подключена к компьютеру.
Собственный софт-телефон YouMagic
Это весьма любопытная и малоизвестная функция, специфичная для свежей версии Rosa Desktop. Суть в следующем: российская компания МТТ выпустила свой программный телефон (софтфон) YouMagic для общения по IP-телефонии, аналог Скайпа. Этот YouMagic умеет звонить на любые телефонные номера по щадящим тарифам, а также позволяет бесплатно обмениваться звонками между устройствам с установленным софтфоном (клиентом). На официальном сайте есть версии клиента под Mac, Windows, Android и iOS, но ничего не сказано про Linux. Однако, видимо МТТ как-то договорилась с Росой, поэтому в этой ОС эксклюзивно имеется полноценная версия YouMagic.
Логином для использования софтфона является уникальный телефонный номер, который выдаётся всем пользователям. Как следует я пока программу не тестировал, но она определённо работает.
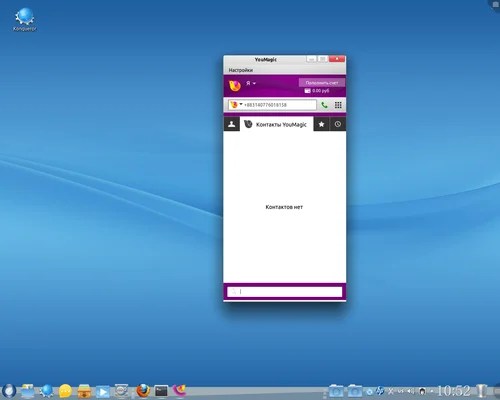
YouMagic запущен (Щёлкните для просмотра в полный размер)
Фантомные перспективы
Есть также российская операционная система «Фантом». Теоретически является разработкой компании Digital Zone (по факту — «домашняя заготовка» Дмитрия Завалишина). Последний каждый год горячо доказывает преимущества своего «детища» на выставке HighLoad и прочих подобных мероприятиях.
В принципе, и на сей раз ничего подлинно революционного и нового российская операционная система Phantom не содержит. Разработчики и впрямь не лукавят, когда заявляют, будто бы их ОС не является клоном Windows/Unix.
Вот только они отчего-то «забывают» рассказать, что «Фантом» является почти точной копией системы KeyKOS/EROS. Причем тема эта была начата в далеких 80-х прошлого века, когда были заложены общие принципы разработки KeyKOS.
Для установки операционной системы ROSA Linux нужно подготовить компьютер, выбрать и скачать образ, записать его на USB-накопитель («флэшку») или диск DVD и, наконец, установить систему. Все это не так сложно и, если ваш компьютер окажется хорошо совместимым с ROSA Linux, даже начинающий пользователь может справиться с установкой.
Подготовка компьютера
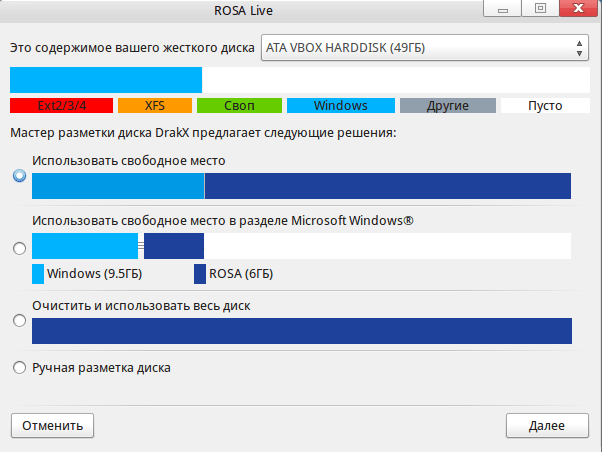
Проще всего ставить ROSA Linux на пустой диск или с удалением всей информации на диске. Но такой вариант не слишком удобен — скорее всего у вас есть важные документы или фотографии, а может быть вы хотите сохранить Windows или другую систему рядом с ROSA Linux, чтоб иметь возможность работать и там, и там.
Если у вас уже установлена другая система и вы хотите сохранить её, возможно понадобиться расчистить свободное место для нашего линукса. Мы рекомендуем использовать те инструменты, что встроены в вашу, уже установленную систему для изменения разделов на диске так, чтоб осталось свободное, неразмеченное место объемом не менее 20 ГиБ. Инсталлятор ROSA Linux и сам это умеет делать, но обычно любая система обрабатывает свои разделы наиболее корректно. Также, если вы используете последние версии Windows, рекомендуется отключить в них технологию «быстрого старта» командой
Powercfg -h off
Примечание
Рекомендуется делать установку на компьютере, подключенном к сети Интернет с помощью кабеля. Это позволит инсталлятору автоматически определить ответы на большинство вопросов и сделает возможным установку драйверов для wifi (если они сразу не определятся)
Выбор образа и окружения рабочего стола
Актуальные образы ROSA
- ROSA Desktop Fresh R9 — первый релиз платформы 2016.1, который будет поддерживаться 4 года, в соответствии с политикой выпуска, до окончания разработки новой платформы 2018.1. R9 отличается новыми версиями программ и рекомендуется прежде всего для энтузиастов.
- ROSA Desktop Fresh R8.1 — Для пользователей, предпочитающих стабильность.
Окружения рабочего стола
В отличие от Windows, в ROSA Linux вы можете выбрать различные оболочки-окружения рабочего стола по своему вкусу и скачать образ с ними.
Доступные окружения рабочего стола:
Дистрибутив ROSA R8
Дистрибутив ROSA R9
Также доступны две архитектуры — i586 и x64, соответственно — 32-разрядная и 64-разрядная.
64-разрядная использует значительно больше оперативной памяти но работает несколько быстрее, 32-разрядные программы, например skype или steam в 64-разрядной системе работают нормально. Также нужно учитывать, что некоторые программы, например viber
или WarThunder
доступны только в 64-разрядном исполнении а значит для них нужна 64 разрядная система. Современные компьютеры также используют технологию UEFI.
Вкратце, если у вас современный компьютер с более чем 2 Гиб памяти, то выбирайте образ x64UEFI
, если же памяти 1 или 2 Гиб — 32-разрядную архитектуру i586
.
Примечание
Вы можете оценить, как будет работать на вашем компьютере выбранный вами образ ROSA Linux и без установки, для этого нужно загрузиться в Live
-режиме, выбрав в меню загрузки Start ROSA Desktop
Запись образа на USB-накопитель и загрузка с него
Чаще всего ROSA Linux устанавливают на компьютер с помощью USB-накопителя. Для установки вам понадобится флэшка объемом 4ГиБ или более и программа ROSA ImageWriter . Выберите в этой программе вашу флэшку и выбранный вами образ и нажмите «Записать»
Теперь вам нужно перезагрузиться с флэшки. Обычно для этого нужно выбрать порядок перезагрузки в BIOS вашего компьютера. Как это сделать зависит от конкретной модели компьютера и описано в его документации, часто для этого используются нажатие клавиш F12 или F2 в самом начале загрузки.
Если вы расчистили перед установкой место для ROSA Linux, выберите в инсталляторе установку на свободное место.
Большинство вопросов, возникающих при установке, может быть разрешено с помощью Errata
Выключение системы и режимы ожидания пользователя
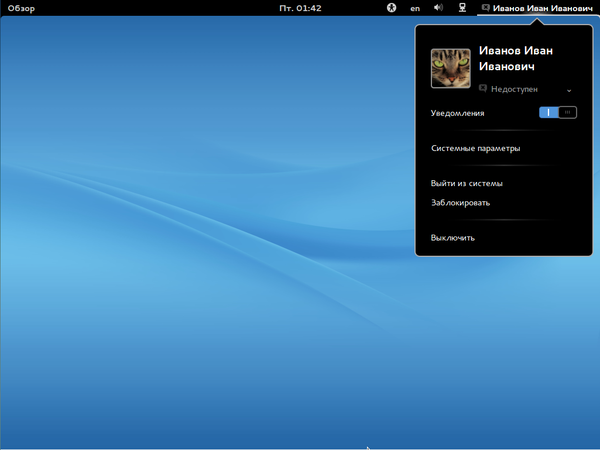
Завершить работу с системой проще простого. Нажмите на имя пользователя в верхнем правом углу. В выпадающем меню находятся различные варианты окончания работы с ROSA Desktop Fresh 2012 GNOME. «Выйти из системы» завершает текущий сеанс, «Заблокировать», соответственно, блокирует его. При нажатии на пункт «Выключить» появляется окно, где доступны два варианта выбора: либо перезагрузить компьютер, либо окончательно выключить его.
Если вы желаете перевести систему ждущий режим, перед открытием меню пользователя зажмите клавишу ALT на клавиатуре — вместо пункта меню «Выключить» появится пункт «Ждущий режим».
Подготовка к установке Rosa
Загрузка образа
Далее нажмите кнопку Скачать Rosa Fresh, а в следующем окне выберите нужную версию:
Как я уже писал, доступны версии с KDE 4, Plasma 5, XFCE, LXQT. Кроме того, поддерживаются как 32-, так и 64-битные версии.

Запись образа на флешку
Для записи Rosa на флешку разработчики рекомендуют использовать утилиту RosaImageWriter. Скачать её можно на странице выбора редакции дистрибутива.
Здесь есть версия для Windows, Linux и MacOS. После завершения загрузки нужно распаковать полученный архив и запустить программу RosaImageWriter:
В Linux программу надо запускать от имени суперпользователя. Затем в разделе Image выберите образ Rosa, а в разделе USB Device выберите нужное устройство. Далее нажмите кнопку Write и дождитесь завершения записи:
3. Настройка BIOS
Когда запись образа на флешку будет завершена, можно переходить к установке. В BIOS вашего компьютера нужно установить вашу флешку в качестве первого устройства для загрузки. Чтобы войти в меню BIOS, во время заставки BIOS несколько раз нажмите кнопку Del, F2, Shift+F2 или F8.
Независимо от того, старый у вас BIOS или новый, нужно найти меню Boot и в разделе Boot Device Priority установить на первое место вашу флешку, а затем сохранить настройки и выйти. Флешка должна быть подключена к компьютеру.
Обзор дистрибутива Linux ROSA FRESH R10 KDE

ROSA FRESH – это дистрибутив операционной системы Linux, он бесплатный и предназначен для домашнего использования. Разработкой и поддержкой дистрибутива занимается Российская компания «РОСА» (ООО «НТЦ ИТ РОСА»).
ROSA FRESH выпускается для архитектур процессора i586 (32 битная версия) и x86_64 (64 битная версия). Дистрибутив многоязычный с поддержкой Русского языка.
На текущий момент Linux ROSA FRESH R10 доступен с графическими оболочками KDE и KDE Plasma.
Как я уже сказал, дистрибутив ориентирован на домашнее использование, поэтому «из коробки» доступно все необходимое программное обеспечение для работы за компьютером, по умолчанию здесь есть: офисный пакет, браузер, торрент клиент и другие приложения, а также есть возможность легко установить и такие популярные приложения как Viber и Skype.
К особенностям дистрибутива Linux ROSA можно отнести набор уникальных, функциональных и главное удобных компонентов, например:
Меню SimpleWelcome – это единая точка запуска приложений и компонентов системы. Меню содержит три вкладки:
- Приветствие — вкладка отображает самые часто используемые элементы, например приложения, которые недавно запускались;
- Приложения – вкладка предназначена для запуска приложений, которые установлены в системе. Некоторые приложения сгруппированы по своему функциональному назначению, например, все офисные приложения сгруппированы в группу Офис;
- TimeFrame — это компонент, который позволяет отслеживать работу пользователя на ленте времени, например, находить файлы, которые редактировались в тот или иной момент времени.

Панель RocketBar – это панель для быстрого доступа и запуска приложений и компонентов. Особенностью панели является возможность использования иконок размером чуть больше самой панели, что добавляет некую оригинальность интерфейсу. RocketBar логически делится на три зоны: Левая – для меню SimpleWelcome, а также для быстрого запуска приложений, Центральная – для отображения текущих задач, Правая – для отображения дополнительных виджетов (часы, корзина и т.д.).
![]()
Установка драйвера nVidia в ROSA Linux и обновление системы
143
4
2
00:14:01
14.01.2023
Второе видео по установке и настройке отечественного дистрибутива ROSA Fresh Desktop 12.3. Всем приятного просмотра
ROSA Fresh Desktop 12 — новое поколение операционных систем ROSA на базе платформы 2021.1.
Для ROSA Fresh Desktop 12 доступен образ с окружением рабочего стола KDE5 (Plasma). Также доступен минималистичный серверный дистрибутив. Остальные варианты будут публиковаться по мере их подготовки сообществом.
Ссылка на мой игровой канал: 🤍
Ссылка на скачивание образа отечественной ОС: 🤍
#rosalinux #linux #отечественныеоперационныесистемы
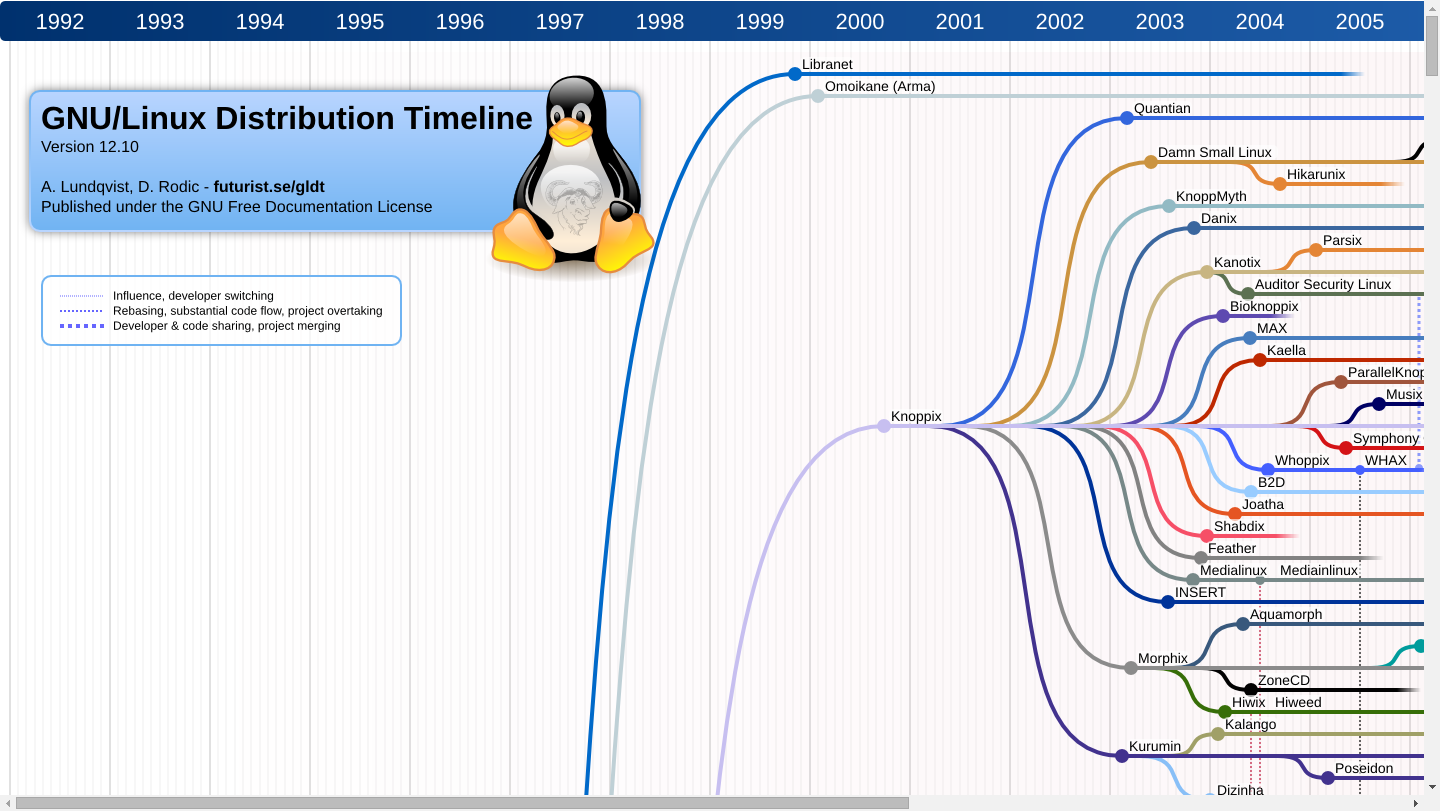
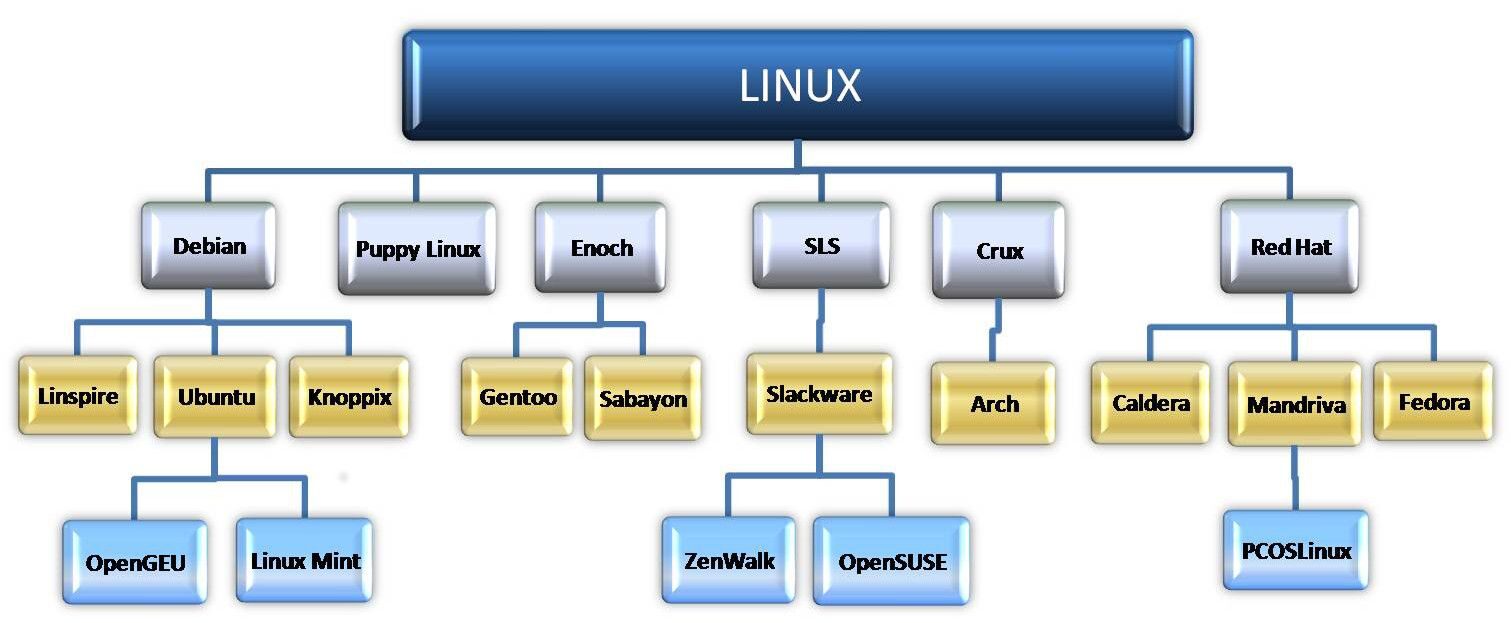
Отправная точка
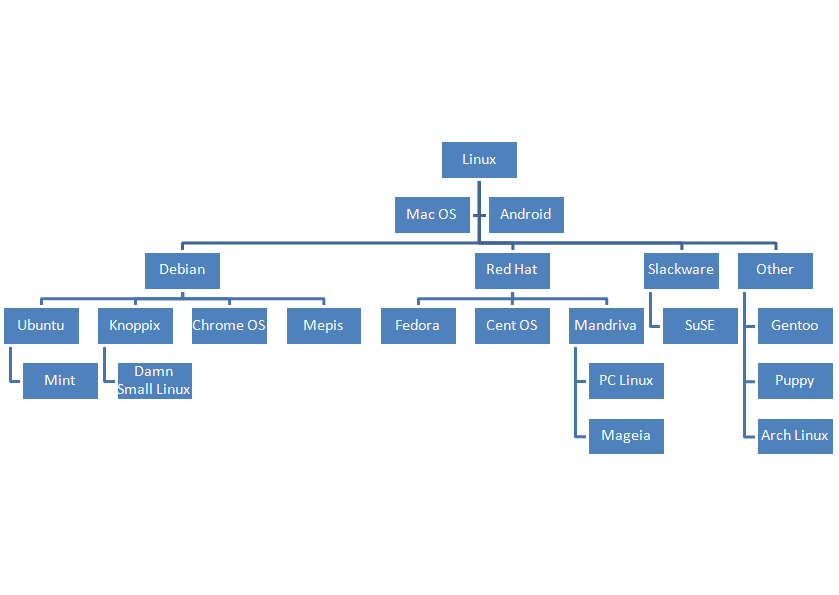
Я поймал себя на мысли, что я не знаю, по каким параметрам сравнивать LINUX-дистрибутивы. Залез в Википедию, понятнее не стало. Какие критерии рассматривать? Что брать за точку отсчета? Как по мне — самый показательный критерий для серверной ОС — стабильность работы. Но в рамках тестовых испытаний слово «стабильность» звучит как минимум странно. Ну неделю я покопаюсь в развернутой системе… Но неделя — не показатель в мире, где пара лет аптайма — это даже не среднее значение. Нагрузочное тестирование? Чем нагрузить систему на стенде? Причем нагрузить надо именно ОС, а не приложение, причем нагрузить так, чтобы она рухнула… А если не рухнет ни одна — как сравнивать?.. Но потом я пришел к выводу, что стабильность можно условно подтянуть от дистрибутива-отца «отечественной» ОС. Для Astra, например, таковым является Debian, для ROSA — Mandriva, для Calculate — Gentoo и т.д. И только для Альт уже настолько давно отпочковался от Mandrake, что его можно считать самостоятельным дистрибутивом (по отношению ко всем остальным «отечественным» ОС). Но прошу помнить, что это все крайне условно, потому что неизвестно, чем напичкали исходные коды доработчики, и что было изменено в рамках повышения защищенности ОС.
Более отслеживаемым критерием является состав пакетов поставки ОС и пакеты в ее репозитории. Но в данном вопросе надо исходить из требований необходимости. У меня свои задачи, которые нужно решать, у вас — свои, а подход к выбору ПО должен быть именно таким: «Задача — выбор ПО», а не наоборот, как это часто бывает в некомерции…
Так вот, сервисы, которые нужно развернуть при «переезде»:
- Почтовый сервер
- Zabbix
- СУБД
- Веб-сервер
- Jabber-сервер
- Резервное копирование
- Офисный пакет
- СУФД и Банк клиенты
- Почтовый клиент
- Браузер
AD, DNS, DHCP, CertService остаются на Windows-серверах (объяснения по этому поводу были даны в предыдущей статье). Но справедливости ради замечу, что Сервис каталогов можно поднять на той же SAMBA или FreeIPA, а у части дистрибутивов заявлены «свои» службы каталогов (Astra Linux Directory, ALT, ROSA Directory, Lotos Directory). DNS и DHCP так же поднимаются на любом Linux-дистрибутиве, а сервер сертификации нужен не всем.
Почтовый сервер
. Мне нравитсяZimbra . Я с ней работал, она удобна, умеет забирать данные с Exchange, умеет много чего. Но она может быть развернута только на ROSA Linux. На остальные ОС ее поставить можно, но это не будет считаться легитимным. С другой стороны, на каждой из «отечественных» ОС есть свой набор почтовых серверов, это я уперся в Zimbra.
Zabbix
. У него нет конкурентов. В рамках импортозамещения — тем более. Zabbix есть в составе Alt Linux, РЕД ОС, Astra и ROSA. У Calculate он с пометкой «нестабильный».
СУБД
.PostgreSQL поддерживают все «отечественные» ОС.
Веб-сервер
.Apache есть во всех серверных ОС.
Jabber-сервер
. Вообще, планируется внедритьБитрикс24 , но я привык к тому, что у нас все очень долго происходит, и поэтому рассматриваю вариант с корпоративным чатиком на основе jabber. Я привык кOpenFire . Он есть в составе Calculate, РЕД ОС и ROSA. Так же есть ejabberd в составе ROSA, Альт, РЕД ОС и Astra.
Резервное копирование
. ЕстьBacula , входит в состав Astra, Rosa, Alt, Calculate, AlterOS.
Офисный пакет
. Бесплатный офисный пакетLibre Office есть во всех клиентских (а часто и в серверных) «отечественных» ОС.
Почтовый клиент
.Thunderbird есть во всех клиентских (а часто и в серверных) «отечественных» ОС.
Браузер
. Как минимумMozilla Firefox есть во всех ОС.Яндекс.Браузер так же можно установить на все ОС.
С СУФД и Банк клиентами
все несколько сложнее. Официально все это может работать чуть ли не на всех «отечственных» ОС. На практике же проверить это довольно сложно, так как нужно взять пользователя, привести к тестируемой машине и сказать «пробуй». Это чревато. Так что на первое время я оставлю старую схему — по виртуальной машине на каждый Банк клиент с Windows и проброшенным в нее токеном. Благо уж токены-то Linux умеет пробрасывать точно. А там видно будет.
Далее приступим к выбору Операционных Систем, удовлетворяющих нашим нуждам. Но для объективности я постарался охватить как можно большее число ОС из реестра Минкомсвзяи.
Оптимистичное начало
Наиболее известным проектом, который теоретически может претендовать на столь значимые роли, является «Синергия». Эта система использует ядро Linux, решение о ее разработке было принято совсем недавно, 13 августа 2014 года. Об этом решила совместная комиссия (на заседании компаний ОАО «Российские железные дороги», «Росатом») и Российский федеральный ядерный центр из города Сарова.
К слову говоря, именно на предприятии «Синергия» сейчас она должна интенсивно тестироваться. От «Российских железных дорог» потребуется активное «доведение до ума» ОС при условии ее использования в системах управления пользовательскими базами данных. Уж таких-то у РЖД хватает!
Кстати говоря, вся эта затея вообще была инициирована специалистами «Росатома», так как в чрезвычайно велика доля импортного программного обеспечения, а от такой порочной практики уже давно было пора уходить. Все причастные к разработке обещают, что российская будет защищена от взлома не хуже лучших зарубежных аналогов.
Выводы
Из того, что я прочитал о ROSA, я понял, что цель дистрибутива — быть удобной системой для обычных пользователей. Если это действительно то, к чему стремится ROSA, то она в основном достигает этой цели. Действительно, все же есть некоторые недочеты, есть много преимуществ, и мне много чего в этой системе нравится.
Для меня основной областью, где ROSA потерпел неудачу, является управление программным обеспечением. Rpmdrake неудобен в использовании, и менеджер пакетов urpmi, вероятно, будет пугающим для большинства новых пользователей. Центр программного обеспечения с поддержкой разных форматов пакетов, таких как Snaps и Flatpaks, был бы желанным улучшением.



